Categories &
Functions List
- BetaDistribution
- BinomialDistribution
- BirnbaumSaundersDistribution
- BurrDistribution
- ExponentialDistribution
- ExtremeValueDistribution
- GammaDistribution
- GeneralizedExtremeValueDistribution
- GeneralizedParetoDistribution
- HalfNormalDistribution
- InverseGaussianDistribution
- LogisticDistribution
- LoglogisticDistribution
- LognormalDistribution
- LoguniformDistribution
- MultinomialDistribution
- NakagamiDistribution
- NegativeBinomialDistribution
- NormalDistribution
- PiecewiseLinearDistribution
- PoissonDistribution
- RayleighDistribution
- RicianDistribution
- tLocationScaleDistribution
- TriangularDistribution
- UniformDistribution
- WeibullDistribution
- betafit
- betalike
- binofit
- binolike
- bisafit
- bisalike
- burrfit
- burrlike
- evfit
- evlike
- expfit
- explike
- gamfit
- gamlike
- geofit
- gevfit_lmom
- gevfit
- gevlike
- gpfit
- gplike
- gumbelfit
- gumbellike
- hnfit
- hnlike
- invgfit
- invglike
- logifit
- logilike
- loglfit
- logllike
- lognfit
- lognlike
- nakafit
- nakalike
- nbinfit
- nbinlike
- normfit
- normlike
- poissfit
- poisslike
- raylfit
- rayllike
- ricefit
- ricelike
- tlsfit
- tlslike
- unidfit
- unifit
- wblfit
- wbllike
- betacdf
- betainv
- betapdf
- betarnd
- binocdf
- binoinv
- binopdf
- binornd
- bisacdf
- bisainv
- bisapdf
- bisarnd
- burrcdf
- burrinv
- burrpdf
- burrrnd
- bvncdf
- bvtcdf
- cauchycdf
- cauchyinv
- cauchypdf
- cauchyrnd
- chi2cdf
- chi2inv
- chi2pdf
- chi2rnd
- copulacdf
- copulapdf
- copularnd
- evcdf
- evinv
- evpdf
- evrnd
- expcdf
- expinv
- exppdf
- exprnd
- fcdf
- finv
- fpdf
- frnd
- gamcdf
- gaminv
- gampdf
- gamrnd
- geocdf
- geoinv
- geopdf
- geornd
- gevcdf
- gevinv
- gevpdf
- gevrnd
- gpcdf
- gpinv
- gppdf
- gprnd
- gumbelcdf
- gumbelinv
- gumbelpdf
- gumbelrnd
- hncdf
- hninv
- hnpdf
- hnrnd
- hygecdf
- hygeinv
- hygepdf
- hygernd
- invgcdf
- invginv
- invgpdf
- invgrnd
- iwishpdf
- iwishrnd
- jsucdf
- jsupdf
- laplacecdf
- laplaceinv
- laplacepdf
- laplacernd
- logicdf
- logiinv
- logipdf
- logirnd
- loglcdf
- loglinv
- loglpdf
- loglrnd
- logncdf
- logninv
- lognpdf
- lognrnd
- mnpdf
- mnrnd
- mvncdf
- mvnpdf
- mvnrnd
- mvtcdf
- mvtpdf
- mvtrnd
- mvtcdfqmc
- nakacdf
- nakainv
- nakapdf
- nakarnd
- nbincdf
- nbininv
- nbinpdf
- nbinrnd
- ncfcdf
- ncfinv
- ncfpdf
- ncfrnd
- nctcdf
- nctinv
- nctpdf
- nctrnd
- ncx2cdf
- ncx2inv
- ncx2pdf
- ncx2rnd
- normcdf
- norminv
- normpdf
- normrnd
- plcdf
- plinv
- plpdf
- plrnd
- poisscdf
- poissinv
- poisspdf
- poissrnd
- raylcdf
- raylinv
- raylpdf
- raylrnd
- ricecdf
- riceinv
- ricepdf
- ricernd
- tcdf
- tinv
- tpdf
- trnd
- tlscdf
- tlsinv
- tlspdf
- tlsrnd
- tricdf
- triinv
- tripdf
- trirnd
- unidcdf
- unidinv
- unidpdf
- unidrnd
- unifcdf
- unifinv
- unifpdf
- unifrnd
- vmcdf
- vminv
- vmpdf
- vmrnd
- wblcdf
- wblinv
- wblpdf
- wblrnd
- wienrnd
- wishpdf
- wishrnd
- adtest
- anova
- anova1
- anova2
- anovan
- bartlett_test
- barttest
- binotest
- chi2gof
- chi2test
- correlation_test
- fishertest
- friedman
- hotelling_t2test
- hotelling_t2test2
- kruskalwallis
- kstest
- kstest2
- levene_test
- manova1
- mcnemar_test
- multcompare
- ranksum
- regression_ftest
- regression_ttest
- runstest
- sampsizepwr
- signrank
- signtest
- tiedrank
- ttest
- ttest2
- vartest
- vartest2
- vartestn
- ztest
- ztest2
Function Reference: procrustes
statistics: d = procrustes (X, Y)
statistics: d = procrustes (X, Y, param1, value1, …)
statistics: [d, Z] = procrustes (…)
statistics: [d, Z, transform] = procrustes (…)
Procrustes Analysis.
d = procrustes (X, Y) computes a linear
transformation of the points in the matrix Y to best conform them to
the points in the matrix X by minimizing the sum of squared errors, as
the goodness of fit criterion, which is returned in d as a
dissimilarity measure. d is standardized by a measure of the scale of
X, given by
-
sum (sum ((X - repmat (mean (X, 1), size (X, 1), 1)) .^ 2, 1))
i.e., the sum of squared elements of a centered version of X. However, if X comprises repetitions of the same point, the sum of squared errors is not standardized.
X and Y must have the same number of points (rows) and
procrustes matches the -th point in Y to the
-th point in X. Points in Y can have smaller dimensions
(columns) than those in X, but not the opposite. Missing dimensions in
Y are added with padding columns of zeros as necessary to match the
the dimensions in X.
[d, Z] = procrustes (X, Y) also returns the
transformed values in Y.
[d, Z, transform] = procrustes (X, Y)
also returns the transformation that maps Y to Z.
transform is a structure with fields:
c | the translation component | ||
T | the orthogonal rotation and reflection component | ||
b | the scale component |
So that Z = transform.
b * Y *
transform.T + transform.c
procrustes can take two optional parameters as Name-Value pairs.
[…] = procrustes (…,
computes a transformation that does not include scaling, that is
transform.'Scaling', false)b = 1. Setting 'Scaling' to true
includes a scaling component, which is the default.
[…] = procrustes (…,
computes a transformation that does not include a reflection component, that
is transform.'Reflection', false)T = 1. Setting 'Reflection' to
true forces the solution to include a reflection component in the
computed transformation, that is transform.T = -1.
[…] = procrustes (…,
computes the best fit procrustes solution, which may or may not include a
reflection component, which is the default.
'Reflection', 'best')
See also: cmdscale
Source Code: procrustes
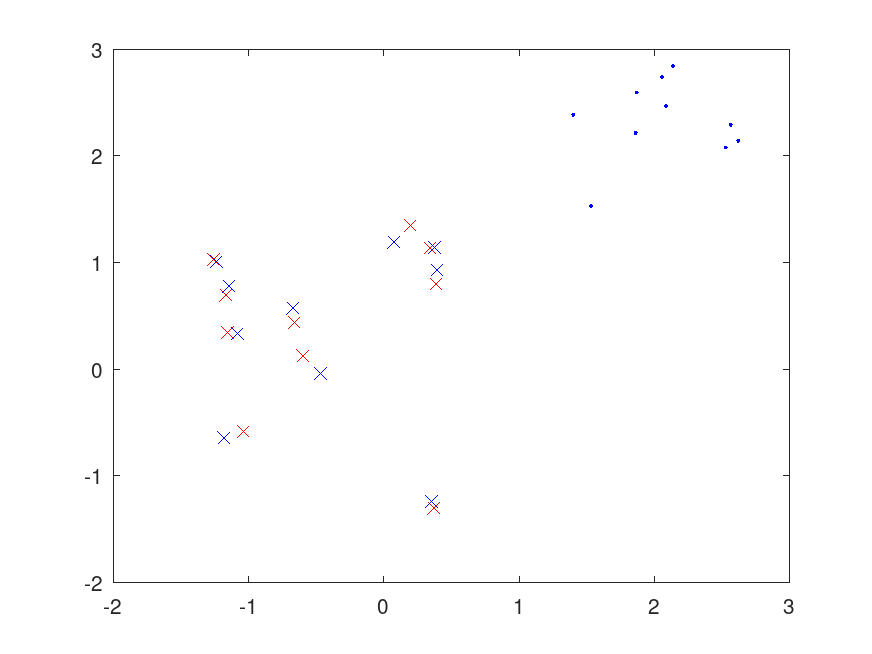
Example: 1
Create some random points in two dimensions
n = 10;
randn ('seed', 1);
X = normrnd (0, 1, [n, 2]);
Those same points, rotated, scaled, translated, plus some noise
S = [0.5, -sqrt(3)/2; sqrt(3)/2, 0.5]; # rotate 60 degrees Y = normrnd (0.5*X*S + 2, 0.05, n, 2);
Conform Y to X, plot original X and Y, and transformed Y
[d, Z] = procrustes (X, Y); plot (X(:,1), X(:,2), 'rx', Y(:,1), Y(:,2), 'b.', Z(:,1), Z(:,2), 'bx');
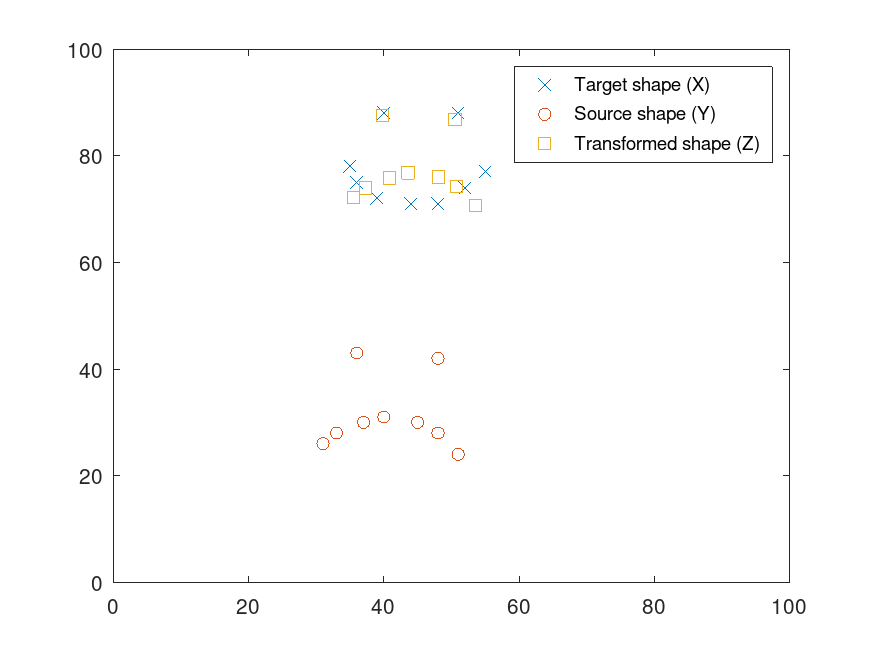
Example: 2
Find Procrustes distance and plot superimposed shape
X = [40 88; 51 88; 35 78; 36 75; 39 72; 44 71; 48 71; 52 74; 55 77];
Y = [36 43; 48 42; 31 26; 33 28; 37 30; 40 31; 45 30; 48 28; 51 24];
plot (X(:,1),X(:,2),'x');
hold on
plot (Y(:,1),Y(:,2),'o');
xlim ([0 100]);
ylim ([0 100]);
legend ('Target shape (X)', 'Source shape (Y)');
[d, Z] = procrustes (X, Y)
d = 0.2026 Z = 39.769 87.509 50.562 86.801 35.549 72.163 37.313 73.991 40.873 75.850 43.552 76.796 48.058 75.977 50.783 74.229 53.541 70.684
plot (Z(:,1), Z(:,2), 's');
legend ('Target shape (X)', 'Source shape (Y)', 'Transformed shape (Z)');
hold off
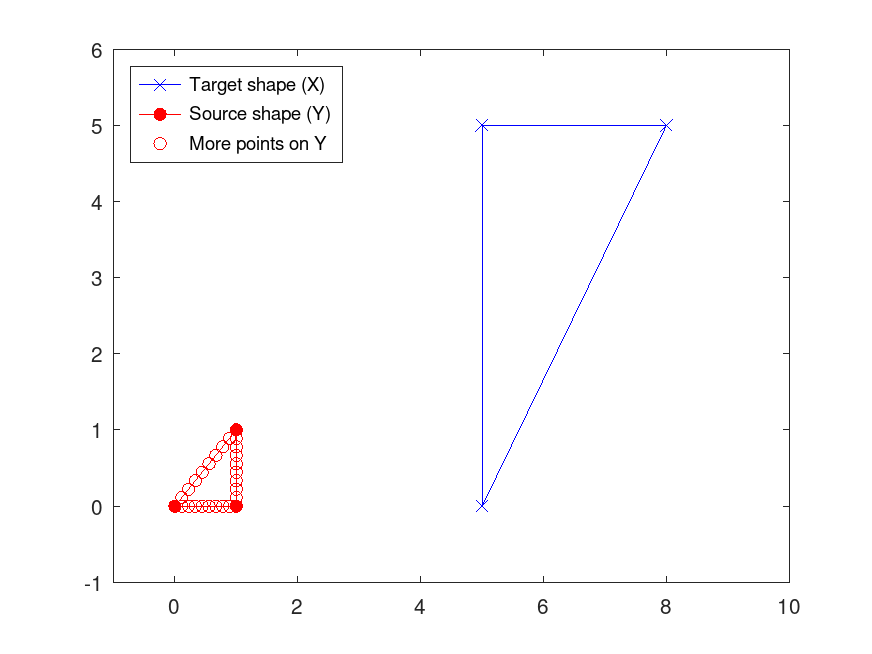
Example: 3
Apply Procrustes transformation to larger set of points
Create matrices with landmark points for two triangles
X = [5, 0; 5, 5; 8, 5]; # target Y = [0, 0; 1, 0; 1, 1]; # source
Create a matrix with more points on the source triangle
Y_mp = [linspace(Y(1,1),Y(2,1),10)', linspace(Y(1,2),Y(2,2),10)'; ...
linspace(Y(2,1),Y(3,1),10)', linspace(Y(2,2),Y(3,2),10)'; ...
linspace(Y(3,1),Y(1,1),10)', linspace(Y(3,2),Y(1,2),10)'];
Plot both shapes, including the larger set of points for the source shape
plot ([X(:,1); X(1,1)], [X(:,2); X(1,2)], 'bx-');
hold on
plot ([Y(:,1); Y(1,1)], [Y(:,2); Y(1,2)], 'ro-', 'MarkerFaceColor', 'r');
plot (Y_mp(:,1), Y_mp(:,2), 'ro');
xlim ([-1 10]);
ylim ([-1 6]);
legend ('Target shape (X)', 'Source shape (Y)', ...
'More points on Y', 'Location', 'northwest');
hold off
Obtain the Procrustes transformation
[d, Z, transform] = procrustes (X, Y)
d = 0.044118
Z =
5.0000 0.5000
4.5000 4.5000
8.5000 5.0000
transform =
scalar structure containing the fields:
T =
-0.1240 0.9923
0.9923 0.1240
b = 4.0311
c =
5.0000 0.5000
5.0000 0.5000
5.0000 0.5000
Use the Procrustes transformation to superimpose the more points (Y_mp) on the source shape onto the target shape, and then visualize the results.
Z_mp = transform.b * Y_mp * transform.T + transform.c(1,:);
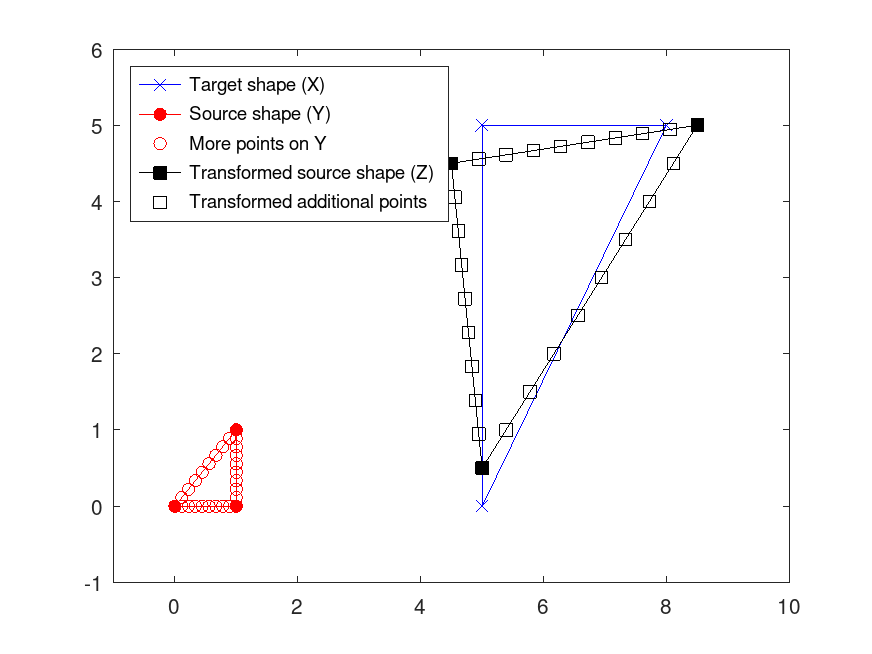
figure
plot ([X(:,1); X(1,1)], [X(:,2); X(1,2)], 'bx-');
hold on
plot ([Y(:,1); Y(1,1)], [Y(:,2); Y(1,2)], 'ro-', 'MarkerFaceColor', 'r');
plot (Y_mp(:,1), Y_mp(:,2), 'ro');
xlim ([-1 10]);
ylim ([-1 6]);
plot ([Z(:,1); Z(1,1)],[Z(:,2); Z(1,2)],'ks-','MarkerFaceColor','k');
plot (Z_mp(:,1),Z_mp(:,2),'ks');
legend ('Target shape (X)', 'Source shape (Y)', ...
'More points on Y', 'Transformed source shape (Z)', ...
'Transformed additional points', 'Location', 'northwest');
hold off
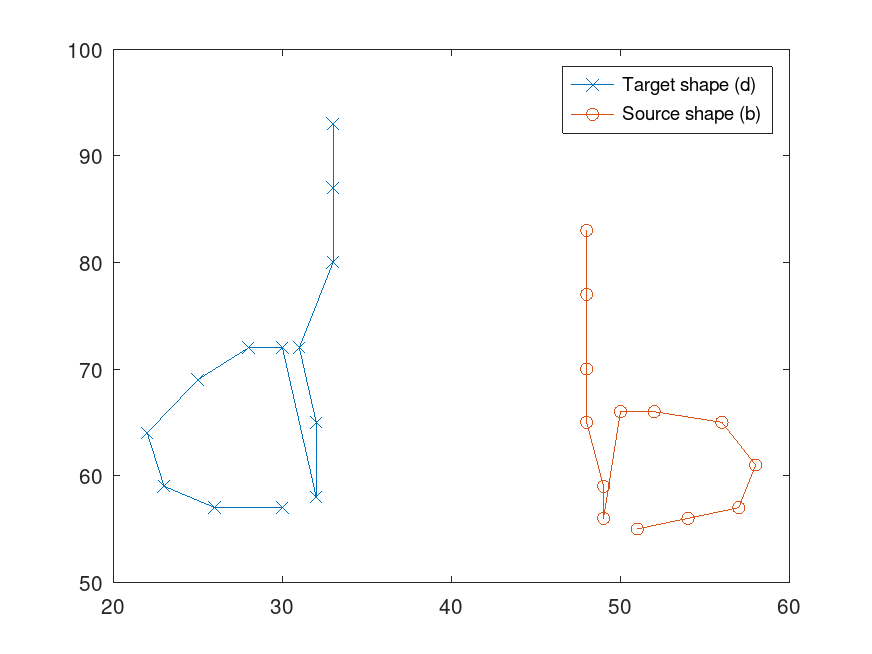
Example: 4
Compare shapes without reflection
T = [33, 93; 33, 87; 33, 80; 31, 72; 32, 65; 32, 58; 30, 72; ...
28, 72; 25, 69; 22, 64; 23, 59; 26, 57; 30, 57];
S = [48, 83; 48, 77; 48, 70; 48, 65; 49, 59; 49, 56; 50, 66; ...
52, 66; 56, 65; 58, 61; 57, 57; 54, 56; 51, 55];
plot (T(:,1), T(:,2), 'x-');
hold on
plot (S(:,1), S(:,2), 'o-');
legend ('Target shape (d)', 'Source shape (b)');
hold off
d_false = procrustes (T, S, 'reflection', false);
printf ("Procrustes distance without reflection: %f\n", d_false);
Procrustes distance without reflection: 0.342463
d_true = procrustes (T, S, 'reflection', true);
printf ("Procrustes distance with reflection: %f\n", d_true);
Procrustes distance with reflection: 0.020428
d_best = procrustes (T, S, 'reflection', 'best');
printf ("Procrustes distance with best fit: %f\n", d_true);
Procrustes distance with best fit: 0.020428